


What Are RS485 And CAN Protocols?
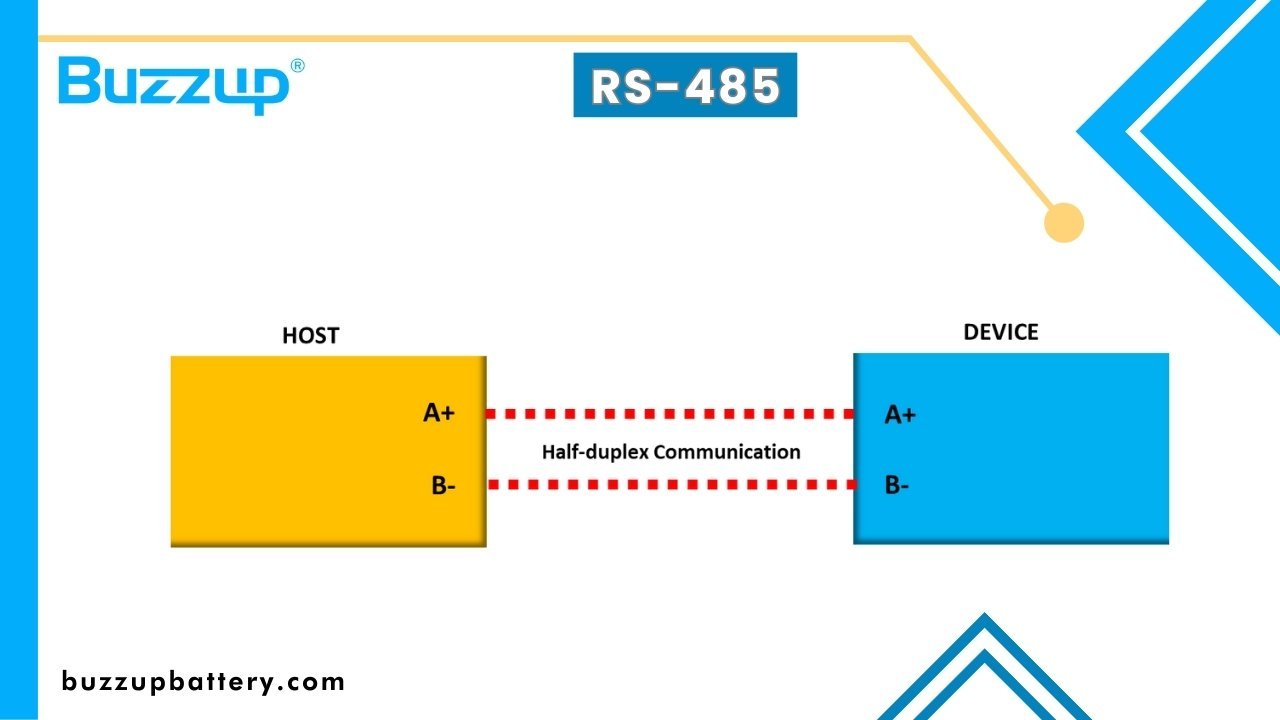
RS485 is a widely used serial communication standard that facilitates the transfer of data between multiple devices across extensive distances. It makes use of a balanced transmission line with differential signaling, which offers noise protection and enables trustworthy data transfer. This makes RS485 especially well-suited for advanced mechanisms and control processes where communication must traverse considerable distances.
On the other hand, CAN (Controller Area Network) is specially designed to enable reliable communication in the automotive and other manufacturing sectors. It uses a multi-master bus architecture to share information and communicate between several nodes. Prioritized message-based communication, in which messages are given varying degrees of significance, is one of the main characteristics of CAN.
Key Features: RS485 vs CAN
Feature |
RS485 |
CAN |
| ISO Model Support | Physical Layer Characteristics | Physical Layer & Data Link Layer |
| Interface Requirement | UART (Universal Asynchronous Receiver-Transmitter) | Controller for CAN Protocol |
| Collision Detection | Functionality Not Implemented | Carrier Sense Multiple Access/Collision Resolution (CSMA/CR) Used |
| Maximum Transmission Rate | Transmission Speed: 10 Mb/s (max. to 12 m) | Transmission Speed of 1 Mbit/s (up to 50 m) |
| Supported Bus Arbitration Principles | Master/Slave or Token Ring | Multimaster and Derived Principles like Master/Slave or Token Ring |
| Maximum Bus Length | Max. 1200m (at 100 kb/s) | Maximum 1600m (at 50 kb/s) |
| Network Transceiver Price | Around 70 cents | Around 35 cents |
| Data Amount/Frame (Max. Limit) | Unlimited Data Capacity | 8 bytes |
| Classification | RS485-Modbus, Profibus | DeviceNet, CANopen, J1939 |
How Do RS485 and CAN Protocols Vary From One Another?
RS485 and CAN protocols exhibit distinct characteristics setting them apart in various aspects. Here are a few differences between the two:
- Flexibility and Scalability: RS485 is more flexible in terms of network size and scalability since it can support a large number of nodes (up to 256) on a single network. On the other hand, CAN is designed for smaller networks with a maximum of 64 nodes, enhancing its real-time capabilities.
- Error Handling: RS485 relies on the application software to handle collision avoidance and error detection making it more dependent on the software implementation. In contrast, CAN has built-in error detection and error management features such as CRC checks and automatic retransmission, which enhance its reliability and fault-tolerant capabilities.
- Network Topology:
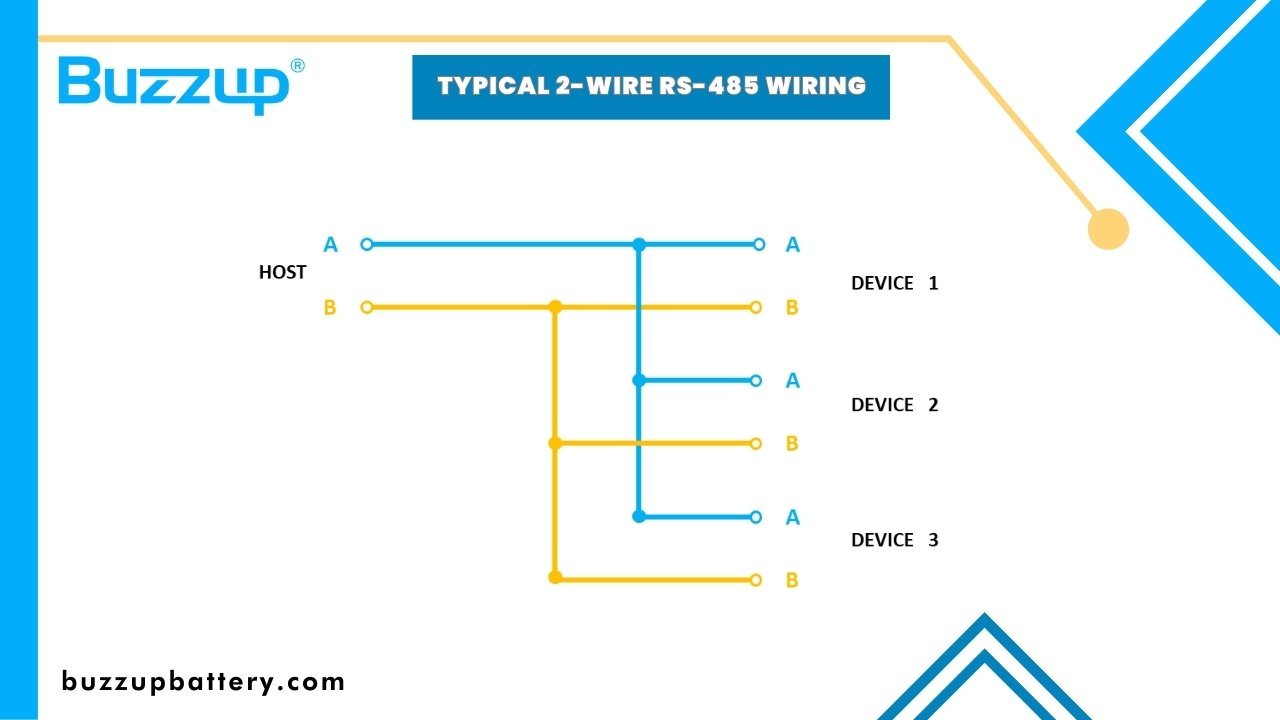
- RS485 supports a point-to-point or multi-drop network topology where multiple devices are connected in a daisy-chain fashion. In contrast, CAN employs a bus architecture that permits simultaneous connections from numerous nodes to a common bus (half-duplex communication).
- Bus Arbitration: In RS485, bus arbitration is not inherent to the protocol. It typically relies on the master-slave relationship and the master polling all the slave devices. In contrast, CAN utilizes a message-wise arbitration mechanism where each message on the bus is assigned a priority based on its identifier. This allows for efficient multi-master operation without the need for additional protocols.
- Latency and Determinism: CAN provides deterministic communication with predictable latency for each message based on its priority. The network latency can be determined regardless of the busload or performance of the nodes. On the other hand, RS485’s latency is influenced by the number of nodes and their response times, resulting in potentially longer latency times.
- Speed and Data Rate: RS485 generally supports lower data rates than CAN. RS485 typically operates at data rates ranging from a few kilobits per second (kbps) to max. 10 Mb/s. The achievable data rate depends on factors such as RS485 cable length, signal quality, and noise interference. On the other hand, CAN allows for faster communication, with data speeds of 10 kbps to 1 Mbps and even higher in specific situations. CAN’s higher data rate capability makes it suitable for applications requiring faster data transmission and real-time responsiveness.
- Noise Immunity: CAN is known for its excellent noise immunity thanks to its use of differential signaling, bit-level acknowledgment, and error-checking mechanisms. This allows CAN to maintain reliable data transmission even in environments with high electromagnetic interference (EMI) and noise, making it ideal for automotive applications.
In comparison, RS485 also provides some noise immunity due to its differential nature but may not be as robust as CAN in loud surroundings. Additional measures, such as proper grounding and shielding, are often necessary to address noise-related challenges in RS485 networks.
What Are The Significance And Benefits Of CAN Bus And RS485 In The Context Of Lithium Battery Industry?
Regarding lithium batteries, the CAN bus and RS485 communication protocols are crucial because they streamline administration, improve security, and maximize efficiency. These protocols allow for the constant monitoring and regulation of vital battery conditions, including voltage, current, temperature, and charge level. These serial protocols improve system dependability by reducing wiring complexity using a unified bus for data transmission.
Accidents caused by overcharging or excessive temperatures may be avoided with continuous monitoring. Therefore, the scalability and adaptability of these two communication standards make it possible to accommodate various battery configurations. Overall, using CAN bus and RS485 in Li-ion batteries ensures improved reliability, simplified wiring, efficient resource utilization, enhanced safety, and scalability, making them popular choices for battery management systems.
CAN Bus Advancement: Does CAN Outperforming RS485 in Lithium Battery Applications?
CAN bus technology, widely used in electronic systems, such as battery management systems (BMS), offers distinct advantages over RS485 in the future of lithium batteries. It simplifies wiring and improves system stability by enabling seamless communication across devices on a single network.
By incorporating a CAN interface into the BMS of LiFePO4 batteries, critical battery properties, including charging, discharging, and temperature, may be precisely monitored and controlled. This promotes peak efficiency and guarantees risk-free battery use.
CAN bus technology have great promise for improving industry-wide communication to Internet Of Things (IoT) smart devices, boosting safety features, optimizing energy storage, and developing more long-lasting battery systems for autonomous cars and drones.
Which Protocol Sees Wider Usage: CAN bus vs RS485?
RS485 and CAN are widely used in various industrial sectors but have different areas of dominance.
- CAN is widely used in the automotive sector as the de facto communication, motor control, and diagnostics protocol for modern automobiles. It enables communication between components such as the engine control unit, sensors, actuators, and infotainment systems. The CAN bus is also used for inter-avionics system communication to share secure data in aeronautical navigation and traffic management systems.
- RS485 and CAN are both also crucial in the battery industry, particularly for lithium batteries. While RS485 allows for dependable connection between battery management systems and battery packs, can bus offers unified operation and data exchange across lithium batteries. These protocols also improve the functionality and security of LiFePO4 battery uses.
- In robotics and other manufacturing automation, RS485 is a prevalent choice for communication between sensors, actuators, and controllers. It is also commonly found in building automation systems, facilitating the seamless connection of devices to regulate lighting, managing HVAC systems, and overseeing other vital building functions.
- RS485 also finds applications in security systems, transit networks, and energy management systems for monitoring and controlling various devices.
- When comparing the adoption rates and popularity of RS485 and CAN, the CAN bus has gained significant traction in automotive and safety-critical applications due to its real-time capabilities, robustness, and standardized protocol. It is widely embraced in industries where noise immunity and reliable communication are critical. On the other hand, RS485 remains commonly used in industrial mechanization and budget-sensitive domains where its simplicity, long-distance communication, and compatibility with existing infrastructure are advantageous.
- Overall, while CAN bus enjoys a dominant position in the automotive industry and safety-critical applications, RS485 maintains its relevance in industrial automation, building automation, security systems, transportation, and energy management. Every sector and application has unique needs; thus, the decision between the two protocols must be made accordingly.
What Are The Strengths And Limitations Of the RS485 Communication Protocol?
Strengths Of RS485:
- Long-distance communication capability allowing safe data transmission across impressive spans of up to 1200 meters.
- Simplicity in wiring and integration, making it easy to implement and integrate into existing systems.
- Widespread availability of RS485 devices and components makes finding compatible hardware easy.
- Cost-effectiveness making RS485 a suitable choice for applications with budget constraints.
Limitations Of RS485:
- Slower data rates compared to other protocols, with typical rates ranging from a few kilobits per second to 10 Mbps.
- Limited error detection capabilities may require additional software-based error-handling mechanisms.
- No inherent error correction capabilities meaning that errors detected must be managed through application-level protocols or additional layers.
What Are The Strengths And Limitations Of CAN As A Communication Protocol?
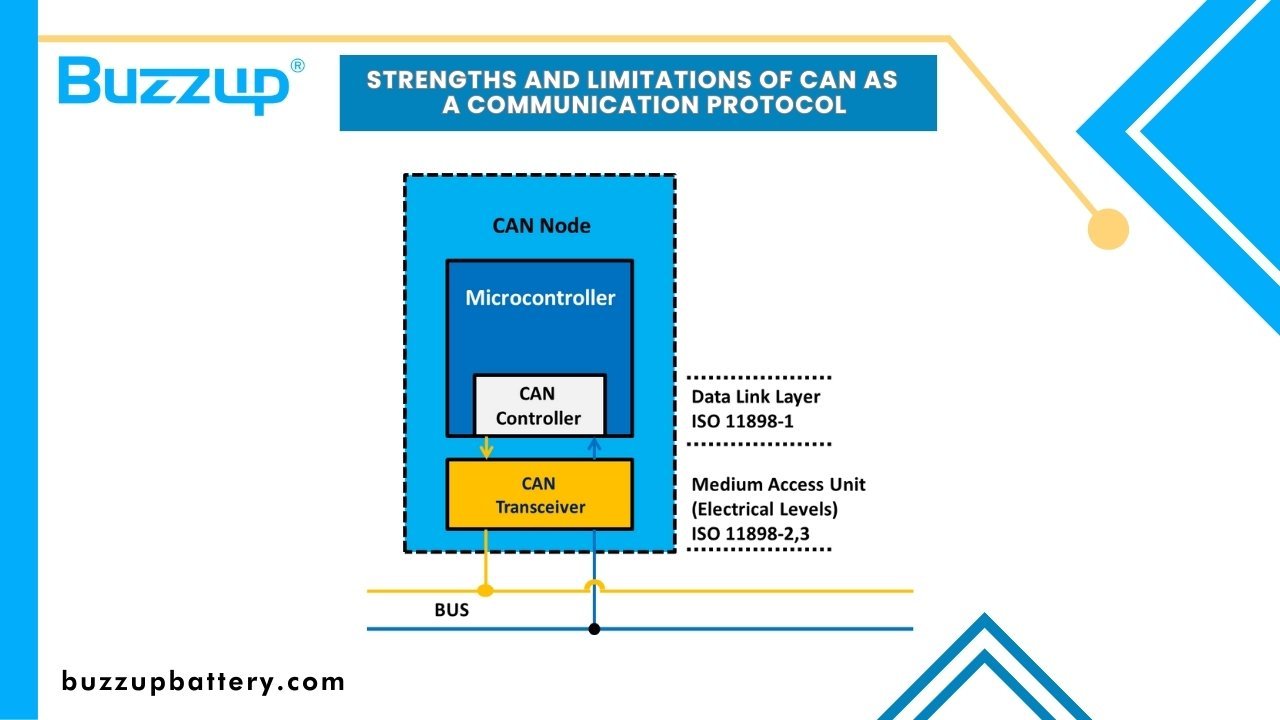
Strengths Of CAN:
- High Data Rates: In the CAN bus vs RS485 comparison, the former supports faster data rates compared to the latter ranging from 10 kbps to 1 Mbps or even higher, allowing for efficient and quick data transmission.
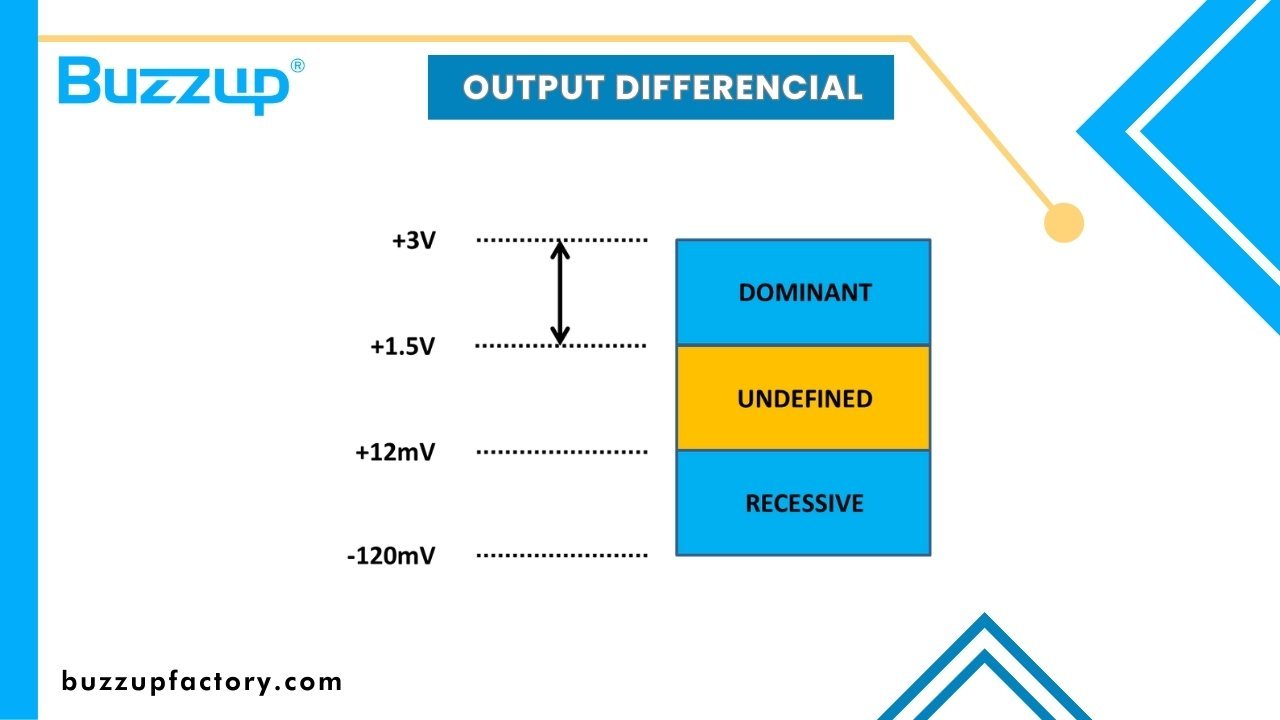
- Excellent Noise Immunity: CAN utilizes differential signaling along with bit-level acknowledgment and error-checking mechanisms making it highly resistant to electromagnetic interference (EMI) and noise.
- Error Detection and Correction Mechanisms: CAN incorporates built-in error detection and error management features such as CRC checks and automatic retransmission, ensuring reliable data transmission and integrity.
- Multi-Master Capability: CAN enables multi-master operation without requiring additional protocols or measures, allowing multiple nodes to transmit and receive data on the bus simultaneously.
Limitations Of CAN:
- More Complex Protocol: CAN has a more sophisticated protocol than RS485, with additional features and mechanisms that may require more effort and expertise for implementation.
- Higher Cost Compared to RS485: CAN transceiver modules and controllers may be more expensive than RS485 components, potentially increasing the overall system cost.
- Limited Maximum Distance: CAN’s maximum distance is typically shorter than RS485, making it less suitable for long-distance communication applications.
Comparing RS485 vs CAN Bus: When Is RS485 Preferable to CAN, And When Is CAN Preferable To RS485?
When deciding between RS-485 and CAN for a particular application, several factors should be considered to make an informed choice.
- RS485 emerges as an optimal selection in cases demanding extended communication distances. It offers better range capabilities, typically reaching distances of up to 1200 meters, making it suitable for applications spread over large areas. Additionally, RS485 supports higher data rates compared to standard baud rates in RS-485 applications, rarely exceeding 115.2 kBaud. This makes it appropriate for applications that demand higher data throughput.
- Regarding noise immunity, both RS-485 and CAN utilize differential signaling providing good standard mode noise rejection. However, RS485’s symmetric signaling scheme simplifies state detection using a simple comparator which can be advantageous in environments with significant noise interference. Furthermore, RS485 allows for relaxed termination requirements making it more flexible in specific scenarios.
- On the other hand, CAN offers several advantages that make it a preferred choice in many applications. Its collision detection capability allows for a peer-to-peer network architecture without the need for central arbitration, enabling efficient communication in systems with multiple nodes.
CAN’s standardized higher-level protocols, complete packet structure, and built-in error detection and correction features make it a robust and reliable choice for complex systems. Moreover, CAN’s power efficiency is superior to RS-485, with lower power consumption requirements to maintain the bus in the dominant state.
In a nutshell, RS485 is a perfect fit for a wide range of scenarios due to extended communication distances and faster data rates. At the same time, CAN is advantageous in scenarios that require collision detection, peer-to-peer networking, standardized protocols, and lower power consumption. Careful consideration of the specific application requirements, constraints, and factors such as distance, data rate, noise immunity, and system complexity will guide the appropriate selection between RS-485 and CAN.
What Are The Approaches To Integrate Or Interface RS485 And CAN?
In order to interface or integrate the RS485 and CAN, you will need specialized hardware and components that have been explicitly developed to permit communication between the two systems. These two protocols are widely used in manufacturing automation and control processes, and bridging the gap between them enables interoperability and seamless data exchange.
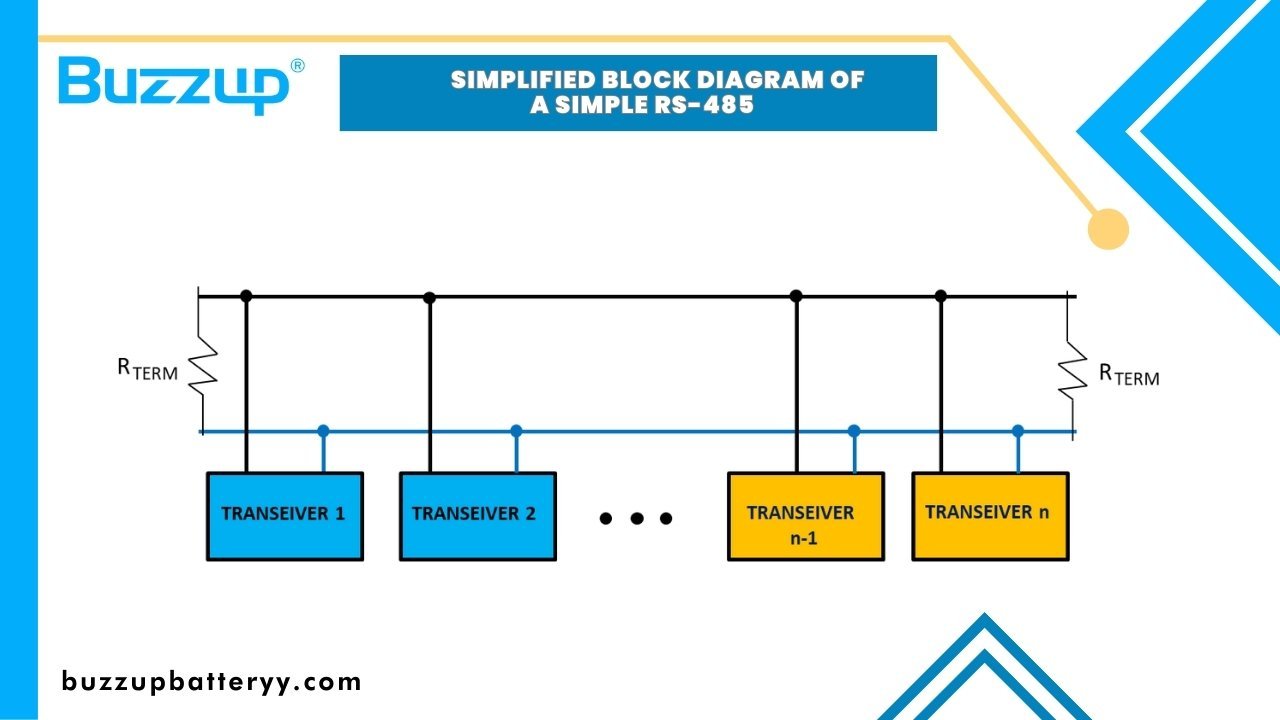
- Several devices and components support RS485 and CAN protocols. For RS485, common devices include RS485 transceivers, converters, and repeaters. These components ensure proper electrical signaling and voltage levels for reliable exchange of information across extended distances. On the other hand, CAN networks utilize CAN controllers, transceivers, and termination resistors for signal integrity and noise immunity.
- Bridge devices and gateways are essential for digital transmission between the CAN and RS485 networks. These devices, known as CAN to RS485 converters, act as intermediaries, converting data between the CAN and RS485 protocols. A typical converter would have both CAN and RS485 interfaces, facilitating seamless bidirectional data conversion. This allows for efficient communication and integration between CAN and RS485 networks in diverse applications.
- In terms of protocol conversion, some bridge devices perform direct translation of RS485 data to CAN frames and vice versa maintaining the message structure and data integrity. These devices often include built-in protocol converters and support various data formats and baud rates.
- Conversely, Gateways provide a higher-level interface enabling more advanced functionality such as protocol filtering, routing, and mapping. This device often has additional features like protocol-specific diagnostics, data logging, and configuration options.
What Alternative Protocols Can Be Explored As Viable Options?
Several options can be considered when considering alternative protocols to RS485 vs CAN, depending on the specific application requirements. Let’s take a closer look at some notable alternatives:
1. Ethernet
- Widely used protocol for local area networks (LANs)
- High data rates and extensive network scalability
- Robust and reliable communication infrastructure
- Suitable for applications requiring fast and efficient data transfer over large distances.
- Industrial-specific protocols like Ethernet/IP and PROFINET enhance interoperability and integration with automation systems.
2. Modbus
- CAN bus vs Modbus: Facilitates unified operation and data exchange among lithium batteries.
- Modbus: Offers simplicity, cost-effectiveness, and ease of implementation in automation industries.
- Modbus supports serial (Modbus RTU) and Ethernet-based (Modbus TCP) communication.
- Modbus is versatile for various applications, such as connecting devices within a local network or integrating with SCADA systems.
3. Profibus
- Fieldbus protocol is widely used in industrial mechanization.
- Offers fast data transmission and deterministic communication.
- Supports various device profiles and broad device compatibility.
- Ideal for demanding industrial applications requiring determinism and extensive device support.
When comparing these alternative protocols with RS485 and CAN, key features and suitability are essential considerations. Here’s a brief comparison:
- Ethernet: Excels in high-speed and large-scale networks.
- Modbus: Offers simplicity and cost-effectiveness for smaller systems.
- Profibus: Ideal for demanding applications requiring determinism and a wide range of supported devices.
In conclusion, ultimately, the choice of an alternative protocol depends on specific application requirements, including data transfer rate, distance, network size, and device compatibility. Carefully evaluating these alternatives will ensure selecting the protocol that best aligns with the desired functionality and scalability of the system.